Zgodnie z sugestią z viewtopic.php?f=14&t=4633&start=10 pozwoliłam sobie założyć wątek o mojej drukarce....
Założenia:
01. HyperCube Evolution-like na profilach 3030
02. przestrzeń robocza min. 320x320x350 mm
03. niski, studencki budżet, wiele elementów z odzysku (min. profile 3030, silniki, zasilacz(e))
04. lekka oś X, na rurkach węglowych, plus łożyska polimerowe
05. kompaktowy ekstruder "direct drive" ( w tej chwili wydruk na bazie BMG Bondtech)
06. stół grzany, plus blacha stalowa+PEI, trzymana magnetycznie, mocowane na stałe, bez pokręteł, OG Prusa style
07. instalacja 24V
08. możliwość zamknięcia w obudowę, do druku ABS etc.
09. procek 32-bit + Marlin 2.0
10. ciche 2208, docelowo via UART
11. szpula filamentu wewnątrz komory, w ramach pogrzewania / suszenia
12. oś Z na dwóch silnikach, śruba trapezowa TR8x8 (tutaj żałuję trochę że nie kupiłam TR8x2, całość stołu waaaaży swoje)
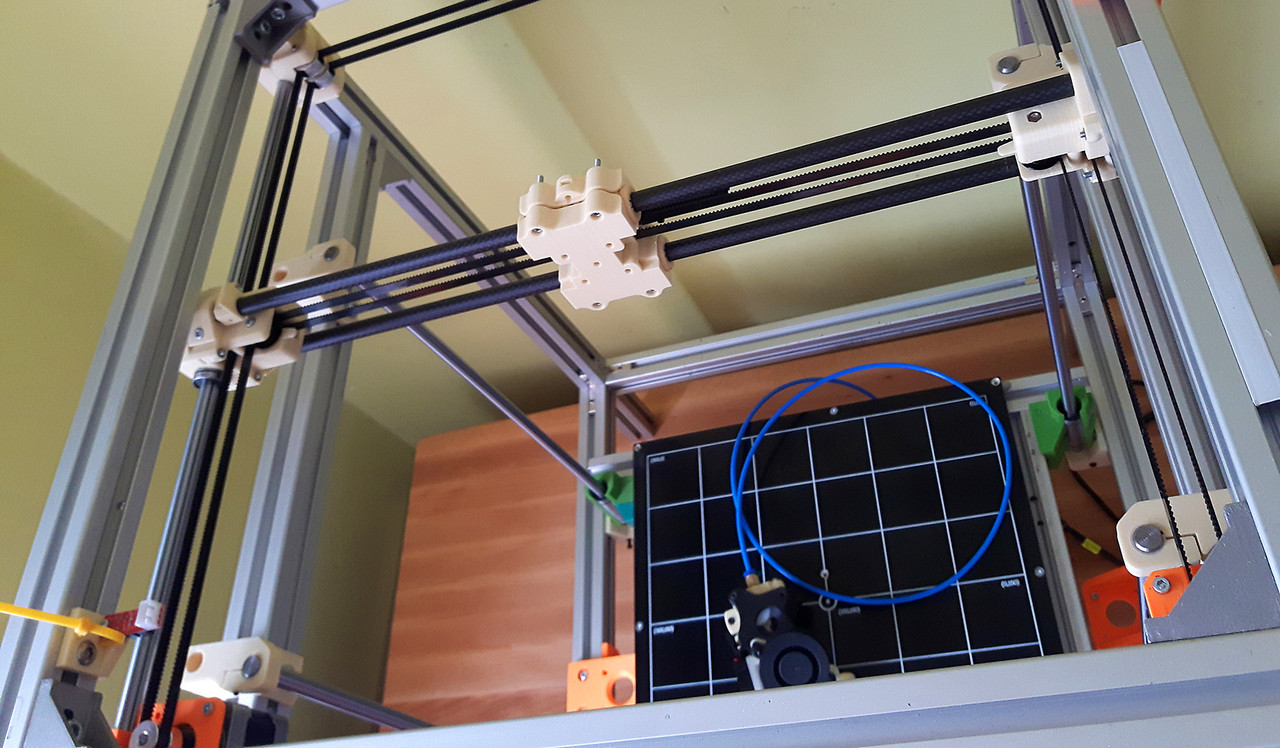
Udało mi się wreszcie złapać chwilę dobrego oświetlenia i chwycić całość w kadr:

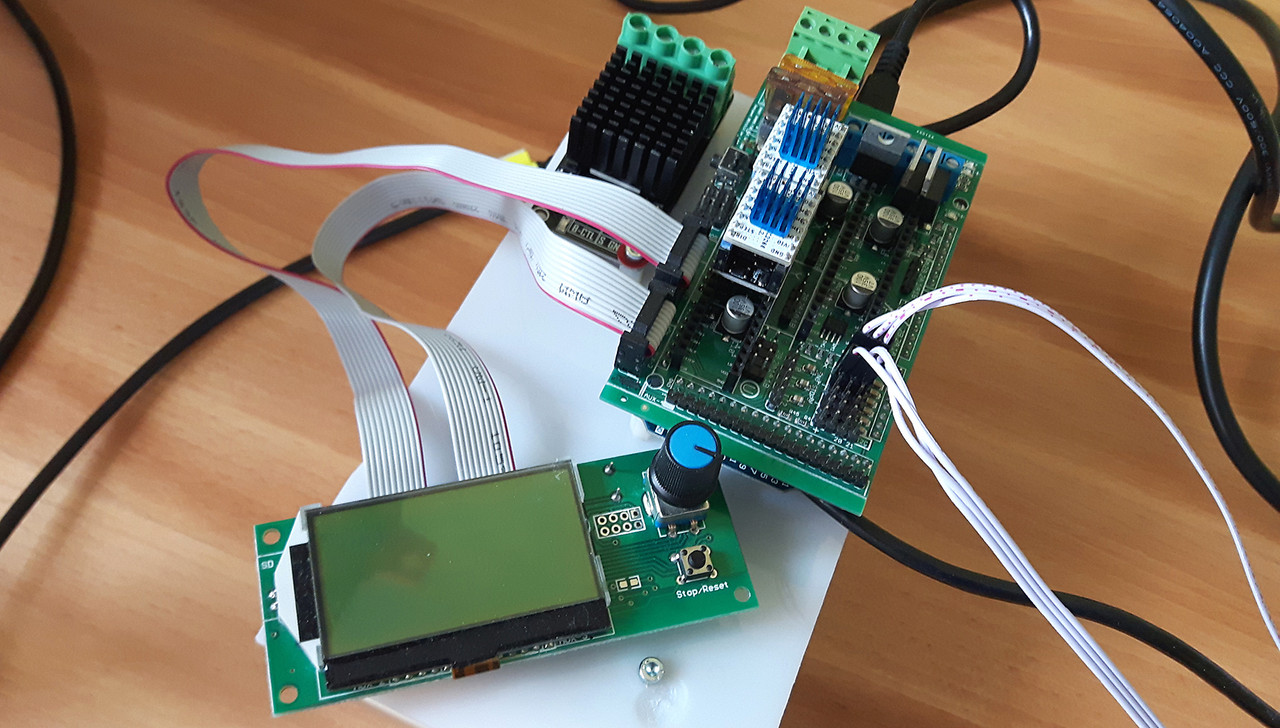
Elektronika to Arduino DUE + SmartRamps, oraz sterowniki TMC2208 od Fysetc, oraz lcd AZSMZ 12864
( zakup elektroniki był robiony jakiś rok temu, nie miałam wtedy do wyboru niedrogich chińskich klonów czy innych SKR....)
Jak widać na załączonych zdjęciach sporo pracy już za mną:
- klatka zbudowana
- większość elementów drukowanych - gotowa (choć niektóre będę musiała przedrukować z ABS)
- silniki XY zamontowane, zębatki założone, paski wstępnie naciągnięte
- elektronika: podpięte silniki XY, oraz end-stop Y
Problemy / do zrobienia:
- ruch karetki na osi X jest nierównomierny - musiałam delikatnie zeszlifować rurki, nie jestem pewna jak uzyskać idealną powierzchnię i średnicę - na chwilę obecną przy ruchu w X występują lekkie ruchy w Y - co na pewno spowoduje problemy z wydrukiem
- podpięcie TMC2208 - na Arduino DUE mam dostępne 3 UART'y sprzętowe, chciałabym wykorzystać je z pomocą biblioteki TMCStepper ( branch: TMCStepper due_sw_uart jeśłi będę potrzebowała więcej UART ??? )
- umieszczenie elektroniki i zasilaczy (są dwa, jeden do stołu (via dodatkowy mosfet), drugi mniejszy do całej reszty) plus chłodzenie tychże - tutaj dam radę zmieścić je na dole
- oświetlenie, obudowa - to już na sam koniec
W wolnej chwili postaram się zrobić więcej zdjęć,
tymczasem chętnie poczytam Waszą krytykę, sugestie i idee - szczególnie w temacie upłynnienia ruchu w X oraz 2208 via UART.
Aha - kilka pytań:
- obciążalność Arduino DUE na linii 5V to 800 mA, oraz kolejne 800 mA na 3,3V - zgadza się?
- na głowicy będę miała: grzałkę 24V 2A, termistor, wentylator chłodzący "cold-end" 12V, wentylator chłodzący drukowany element 24V, sondę indukcyjną 12mm (zapewne na 24V) - które z nich mogę puścić wspólną masą (??) żeby zredukować ilość potrzebnych przewodów ?
Pozdrawiam
--
Basia